
嘉兴第三方检测三坐标检测尺寸测试

三维坐标测量机(CMM)的精密应用:三维坐标测量机是精密制造业中的“显微镜”,通过精密的机械结构、传感器和的测量软件,对复杂形状和尺寸的零部件进行、的三维测量。广泛应用于航空航天、汽车制造、电子通讯等行业,确保产品的每一个细节都符合设计要求,提升产品品质和竞争力。
纳米级扫描电子显微镜(SEM)探索微观世界:扫描电子显微镜利用聚焦电子束在样品表面扫描,激发二次电子等信号来成像,其分辨率可达到纳米级,甚至亚纳米级。在材料科学、生物医学、半导体技术等领域,SEM成为研究微观结构、表面形貌和化学成分的重要工具,为精密量测和科学研究开辟了全新的视角。
形位公差,一般也称为几何公差,是机械加工后零件的实际要素相对于理想要素所允许的误差范围,这些误差包括形状误差和位置误差。形位公差是零件设计和制造过程中不可或缺的重要参数,它直接影响到产品的质量和性能。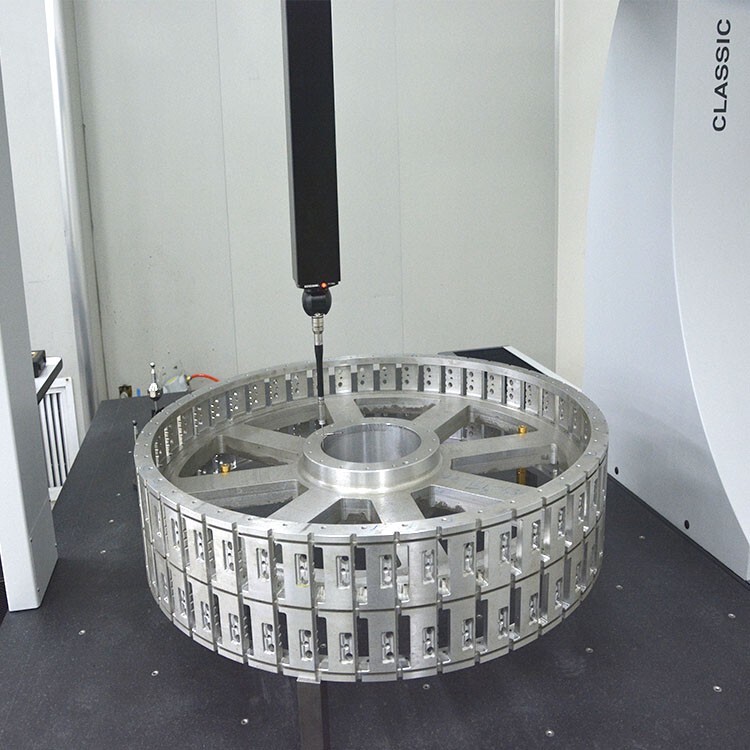
形位公差是指加工成的零件的实际表面形状和相互位置,对理想形状与理想位置的允许变化范围。它涵盖了形状公差和位置公差两大类。
分类:
形状公差:指单一实际要素的形状所允许的变动全量,如直线度、平面度、圆度、圆柱度等。
位置公差:指关联实际要素的位置对基准所允许的变动全量,包括定向公差(如平行度、垂直度、倾斜度)和定位公差(如同轴度、对称度、位置度等)。
形位公差通常通过特定的符号和数值来表示,这些符号和数值被标注在零件图纸上,以指导生产和检验。例如:
直线度:用符号“┬”表示,并在其后面标注公差值,如“┬0.01”表示直线度公差为0.01mm。
同轴度:用符号“◎”表示,并在其后面标注公差值,如“◎0.05”表示同轴度公差为0.05mm。
位置度:用符号“⊕”表示,并配以相应的基准和公差框格,如“⊕Φ0.1 A-B-C”表示某要素的位置度公差为Φ0.1mm,且以A、B、C三个基准面为基准。
公差原则是正确处理尺寸公差与形位公差之间关系的规定。常见的公差原则包括:
立原则:尺寸公差与形位公差彼此无关,分别满足各自的要求。
包容要求:用于单一要素,表示实际要素应遵守大实体边界,其局部实际尺寸不得超出小实体尺寸。

